gmapping 是ROS开源社区中较为常用且比较成熟的SLAM算法之一,gmapping可以根据移动机器人里程计数据和激光雷达数据来绘制二维的栅格地图。
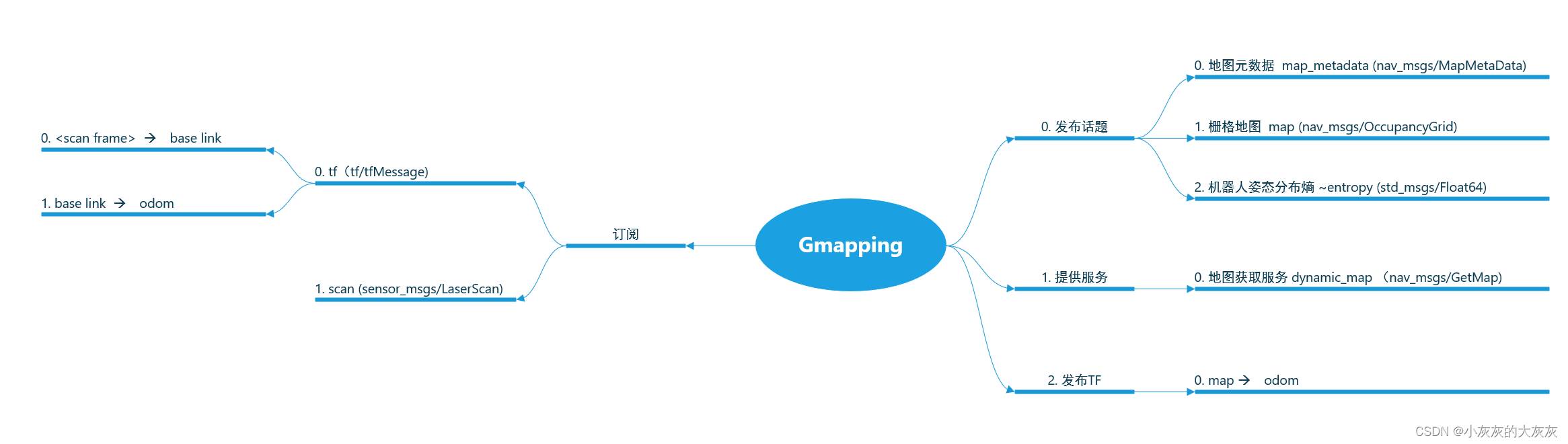
运行的要求(两个TF,一个scan):odom、scan到 base_link的TF、激光雷达
传送门1:ROS WIKI
传送门2:Gmapping 源码
传送门3:Gmapping论文
两个TF
<scan frame> → base_link
通常是固定值,由robot_state_publisher定期广播,或 tf static_transform_publisher。
base_link → odom
车体的里程计
雷达scan数据
scan (sensor_msgs/LaserScan)
话题
map_metadata (nav_msgs/MapMetaData) 地图元数据
map (nav_msgs/OccupancyGrid) 栅格地图数据
~entropy (std_msgs/Float64) 机器人姿态分布熵
服务
dynamic_map (nav_msgs/GetMap) 获取地图数据
TF
map —>odom
sudo apt install ros-<ROS版本>-gmapping
如
sudo apt install ros-noedic-gmapping
文件:传送门。
版权说明:如非注明,本站文章均为 扬州驻场服务-网络设备调试-监控维修-南京泽同信息科技有限公司 原创,转载请注明出处和附带本文链接。
请在这里放置你的在线分享代码