起步发展期:1943年—20世纪60年代
反思发展期:20世纪70年代
应用发展期:20世纪80年代
低迷发展期 20世纪80年代中—90年代中
平稳发展期:20世纪90年代—2010年
蓬勃发展期:2011年至今
1.1943年,美国神经科学家麦卡洛克(Warren McCulloch)和逻辑学家皮茨(Water Pitts)提出神经元的数学模型
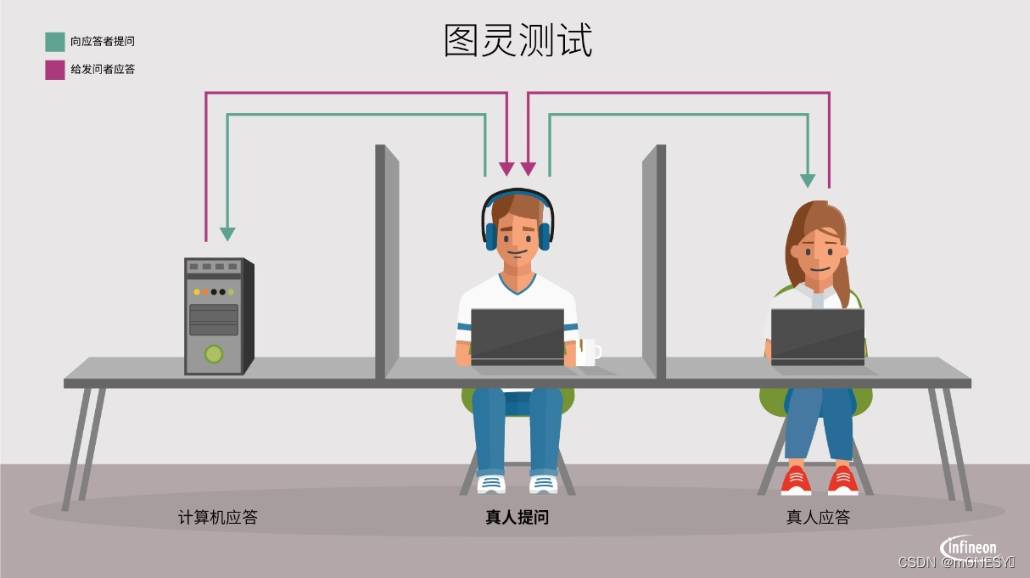
2.1950年,艾伦·麦席森·图灵(Alan Mathison Turing)提出“图灵测试”(测试机器是否能表现出与人无法区分的智能)
艾伦·麦席森·图灵(英语:Alan Mathison Turing,1912年6月23日~1954年6月7日),英国计算机科学家、数学家、逻辑学家、密码分析学家、理论生物学家( [14]),“计算机科学之父”、“人工智能之父”( [21]),英国皇家学会院士( [2])。
https://www.bilibili.com/video/BV1bW4y1n7Xz/?spm_id_from=333.337.search-card.all.click&vd_source=a8ff6e0f61e923fcc0b4303b00b74522
3.1950年,克劳德·香农(Claude Shannon)提出计算机博弈。
4.1956年,达特茅斯学院人工智能夏季研讨会上正式使用了人工智能(artificial intelligence,AI)这一术语
达特茅斯会议上对人工智能的定义是:使一部机器的反应方式就像是一个人在行动时所依据的智能。
5.1957年,弗兰克·罗森布拉特(Frank Rosenblatt)在一台IBM-704计算机上模拟实现了一种他发明的叫做“感知机”(Perceptron)的神经网络模型
https://www.bilibili.com/video/BV19h4y1w7WL/?spm_id_from=333.337.search-card.all.click&vd_source=a8ff6e0f61e923fcc0b4303b00b74522
6.1958年,David Cox提出了logistic regression
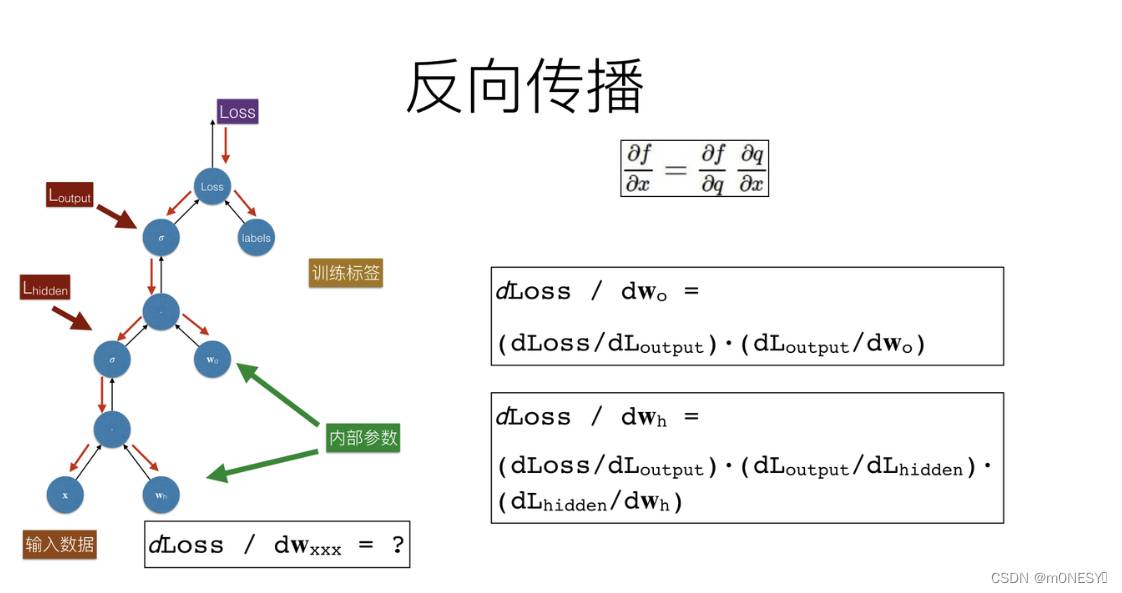
1.1974年,哈佛大学沃伯斯(Paul Werbos)博士论文里,首次提出了通过误差的反向传播(BP)来训练人工神经网络,但在该时期未引起重视

BP算法的基本思想不是(如感知器那样)用误差本身去调整权重,而是用误差的导数(梯度)调整。通过误差的梯度做反向传播,更新模型权重, 以下降学习的误差,拟合学习目标,实现'网络的万能近似功能'的过程。

2.1975年,马文·明斯基(Marvin Minsky)在论文《知识表示的框架》(A Framework for Representing Knowledge)中提出用于人工智能中的知识表示学习框架理论。
马文·明斯基(1927年8月9日-2016年1月24日),男,“人工智能之父”和框架理论的创立者。

3.1976年,兰德尔·戴维斯(Randall Davis)构建和维护的大规模的知识库,提出使用集成的面向对象模型可以提高知识库(KB)开发、维护和使用的完整性
1980年,在美国的卡内基梅隆大学(CMU)召开了第一届机器学习国际研讨会,标志着机器学习研究已在全世界兴起。
1980年,德鲁·麦狄蒙(Drew McDermott)和乔恩·多伊尔(Jon Doyle)提出非单调逻辑,以及后期的机器人系统。
1982年,马尔(David Marr)发表代表作《视觉计算理论》提出计算机视觉(Computer Vision)的概念,并构建系统的视觉理论,对认知科学(CognitiveScience)也产生了很深远的影响。
https://www.bilibili.com/video/BV1cf4y1X7fR/?spm_id_from=333.337.search- card.all.click&vd_source=a8ff6e0f61e923fcc0b4303b00b74522

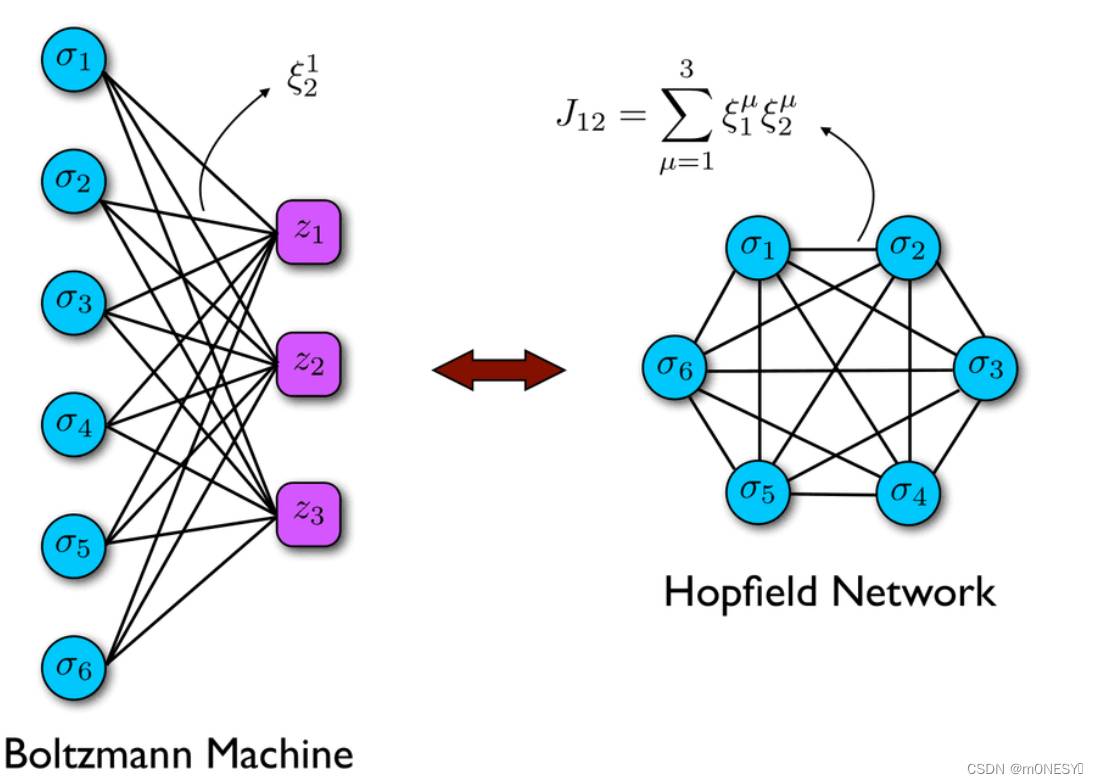
4.络,这是最早的RNN的雏形。霍普菲尔德神经网络模型是一种单层反馈神经网络(神经网络结构主要可分为前馈神经网络、反馈神经网络及图网络),从输出到输入有反馈连接。它的出现振奋了神经网络领域,在人工智能之机器学习、联想记忆、模式识别、优化计算、VLSI和光学设备的并行实现等方面有着广泛应用。
5.1983年,Terrence Sejnowski, Hinton等人发明了玻尔兹曼机(Boltzmann Machines),也称为随机霍普菲尔德网络,它本质是一种无监督模型,用于对输入数据进行重构以提取数据特征做预测分析。
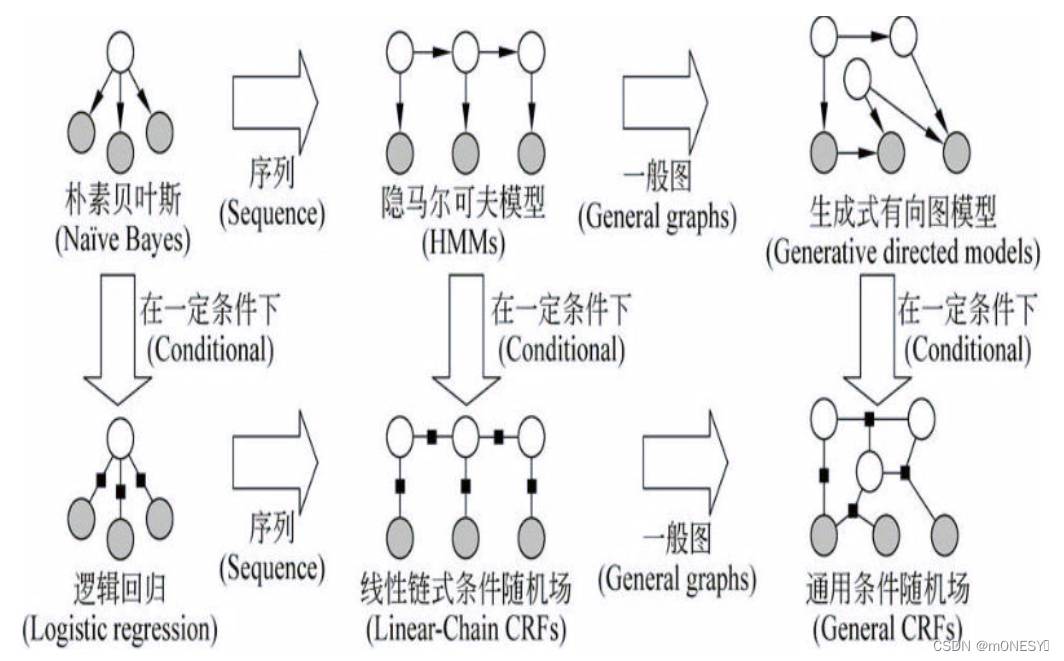
6.1985年,朱迪亚·珀尔提出贝叶斯网络(Bayesian network),他以倡导人工智能的概率方法和发展贝叶斯网络而闻名,还因发展了一种基于结构模型的因果和反事实推理理论而受到赞誉。
贝叶斯网络是一种模拟人类推理过程中因果关系的不确定性处理模型,如常见的朴素贝叶斯分类算法就是贝叶斯网络最基本的应用。
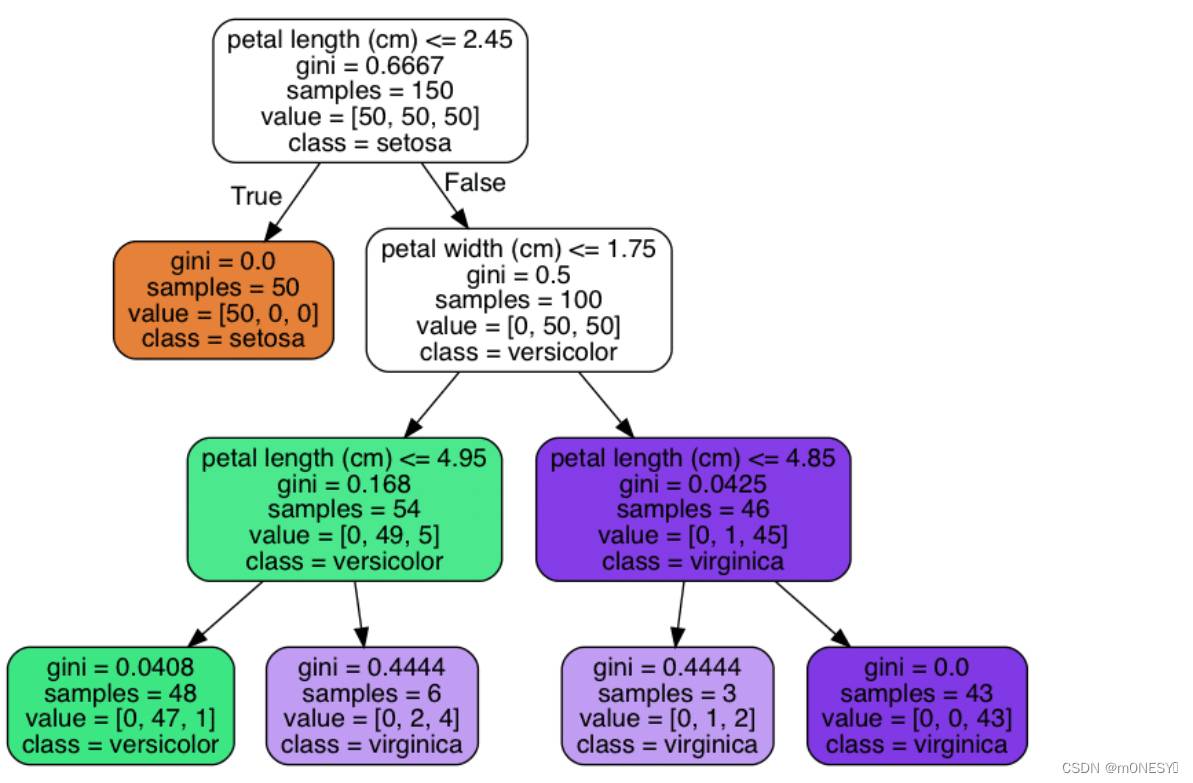
1986年,昆兰(Ross Quinlan)提出ID3决策树算法
决策树模型可视为多个规则(if, then)的组合,与神经网络黑盒模型截然不同是,它拥有良好的模型解释性
版权说明:如非注明,本站文章均为 扬州驻场服务-网络设备调试-监控维修-南京泽同信息科技有限公司 原创,转载请注明出处和附带本文链接。
请在这里放置你的在线分享代码