本篇文章是博主在最优化、人工智能等领域学习时,用于个人学习、研究或者欣赏使用,并基于博主对人工智能等领域的一些理解而记录的学习摘录和笔记,若有不当和侵权之处,指出后将会立即改正,还望谅解。文章分类在最优化算法:
最优化算法(7)---《智能方法求解-圆环内传感器节点最大最小距离分布》
0.问题重述
1.方法介绍
1.1序列二次规划(SLSQP)
1.2 模拟退火算法(Simulated Annealing)
1.3遗传算法(Genetic Algorithm, GA)
2.方法实现
2.1模拟退火算法和SLSQP结合
2.2遗传算法和SLSQP结合
3.实验结论
4.总结
假设有N=20个传感器节点随机分布在半径为R=1公里的圆区域内(如图1所示),现要求:通过调整各传感器的位置,使其稀疏分布于外环半径为R,内环半径为0.8R的圆环区域内(即保证圆环内的邻近传感器节点之间的距离尽可能地远,以减轻电磁互扰)。
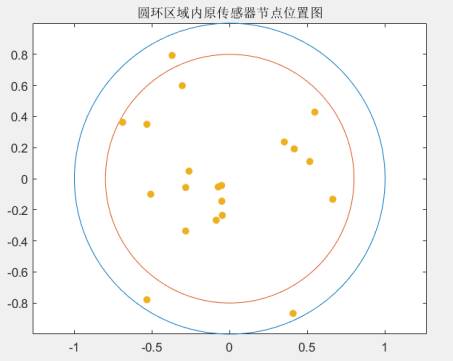
图1 圆环区域内原传感器节点位置图
请完成以下工作:
- 根据题目背景建立传感器位置优化模型
- 提出相关优化算法并求解该数学模型
- 运用相关优化软件给出仿真结果
采用了一种基于凸优化的方法来调整传感器节点在圆环区域内的位置分布,以最大化邻近节点之间的距离,从而减轻电磁互扰。智能方法采用了两种方式:
1)一是采用模拟退火算法的优化思路不断调整节点位置,逐步优化最小距离;通过将模拟退火算法与序列二次规划(SLSQP)结合,首先使用模拟退火进行全局搜索,然后使用SLSQP进行精细化局部优化。
2)二是结合遗传算法(Genetic Algorithm, GA)进行全局搜索,再使用序列二次规划(SLSQP)算法进行局部精细化调整,优化节点位置。
SLSQP是一种用于求解非线性优化问题的算法,特别适合具有非线性约束条件的优化问题。该方法将原始问题转化为一系列二次规划子问题,通过迭代求解这些子问题来逐步逼近最优解。
在代码中,使用了scipy.optimize.minimize 函数,并选择了 SLSQP 作为优化方法。主要的优化步骤包括:
目标函数:定义了目标函数objective,旨在最大化最小距离(通过最小化负值来实现)。
约束条件:定义了两个约束条件constraint1和constraint2,确保节点分布在内外圆环之间。
模拟退火是一种全局优化算法,特别适合处理具有多个局部最优解的复杂优化问题。它通过模拟物理退火过程,逐步降低“温度”,使解从高能态(高温)逐步趋向低能态(低温),从而找到全局最优解。
遗传算法是一种基于自然选择和遗传机制的全局优化算法,模拟生物进化中的选择、交叉和变异过程,广泛用于解决复杂优化问题。
Python代码:
"""
@题目:《圆环区域内传感器节点位置优化建模》---智能方法---SA
@时间:2024年6月26日
"""
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import minimize
# 参数
N = 20
R = 1
inner_R = 0.8 * R
# 初始化节点位置
def init_nodes(N, R, inner_R):
nodes = []
while len(nodes) < N:
x, y = np.random.uniform(-R, R, 2)
if inner_R <= np.sqrt(x**2 + y**2) <= R:
nodes.append([x, y])
return np.array(nodes)
nodes = init_nodes(N, R, inner_R)
# 优化目标函数
def objective(nodes):
nodes = nodes.reshape((N, 2))
min_dist = np.inf
for i in range(N):
for j in range(i + 1, N):
dist = np.linalg.norm(nodes[i] - nodes[j])
if dist < min_dist:
min_dist = dist
return -min_dist
# 约束条件
def constraint1(nodes):
nodes = nodes.reshape((N, 2))
return np.array([np.linalg.norm(node) - inner_R for node in nodes])
def constraint2(nodes):
nodes = nodes.reshape((N, 2))
return np.array([R - np.linalg.norm(node) for node in nodes])
nodes = nodes.flatten()
cons = [{'type': 'ineq', 'fun': constraint1},
{'type': 'ineq', 'fun': constraint2}]
result = minimize(objective, nodes, constraints=cons, method='SLSQP')
nodes = result.x.reshape(N, 2)
# 计算最小距离
min_dist = np.inf
for i in range(N):
for j in range(i + 1, N):
dist = np.linalg.norm(nodes[i] - nodes[j])
if dist < min_dist:
min_dist = dist
print(f"最小距离: {min_dist}")
# 绘制优化后的节点分布图
fig, ax = plt.subplots()
circle = plt.Circle((0, 0), R, color='b', fill=False)
inner_circle = plt.Circle((0, 0), inner_R, color='r', fill=False)
ax.add_artist(circle)
ax.add_artist(inner_circle)
ax.scatter(nodes[:, 0], nodes[:, 1])
plt.xlim(-R, R)
plt.ylim(-R, R)
plt.gca().set_aspect('equal', adjustable='box')
plt.show()运行结果:
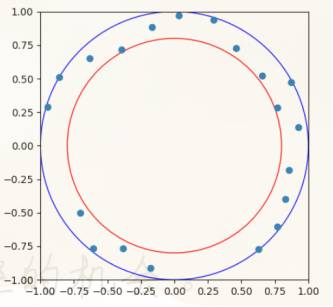
图4 圆环区域内传感器节点位置优化后图

图5 圆环区域内传感器节点位置优化后MATLAB输出结果图
Python代码:
"""
@题目:《圆环区域内传感器节点位置优化建模》---智能方法---GA
@时间:2024年6月26日
"""
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import minimize
from geneticalgorithm import geneticalgorithm as ga
# 参数
N = 20
R = 1
inner_R = 0.8 * R
# 初始化节点位置
def init_nodes(N, R, inner_R):
nodes = []
while len(nodes) < N:
x, y = np.random.uniform(-R, R, 2)
if inner_R <= np.sqrt(x**2 + y**2) <= R:
nodes.append([x, y])
return np.array(nodes)
# 优化目标函数
def objective(nodes):
nodes = nodes.reshape((N, 2))
min_dist = np.inf
for i in range(N):
for j in range(i + 1, N):
dist = np.linalg.norm(nodes[i] - nodes[j])
if dist < min_dist:
min_dist = dist
return -min_dist
# 约束条件
def constraint1(nodes):
nodes = nodes.reshape((N, 2))
return np.array([np.linalg.norm(node) - inner_R for node in nodes])
def constraint2(nodes):
nodes = nodes.reshape((N, 2))
return np.array([R - np.linalg.norm(node) for node in nodes])
# 遗传算法的约束条件
def constraint_all(nodes):
nodes = nodes.reshape((N, 2))
for node in nodes:
if np.linalg.norm(node) < inner_R or np.linalg.norm(node) > R:
return False
return True
# 遗传算法的定义
varbound = np.array([[-R, R]] * N * 2)
algorithm_param = {'max_num_iteration': 1000, 'population_size': 200, 'mutation_probability': 0.1, 'elit_ratio': 0.01, 'crossover_probability': 0.5, 'parents_portion': 0.3, 'crossover_type': 'uniform', 'max_iteration_without_improv': None}
model = ga(function=objective, dimension=N * 2, variable_type='real', variable_boundaries=varbound, algorithm_parameters=algorithm_param, function_timeout=10, convergence_curve=False, progress_bar=False)
model.run()
# 获取遗传算法优化后的节点
nodes = model.output_dict['variable']
nodes = nodes.reshape((N, 2))
# 使用SLSQP进行局部优化
nodes = nodes.flatten()
cons = [{'type': 'ineq', 'fun': constraint1},
{'type': 'ineq', 'fun': constraint2}]
result = minimize(objective, nodes, constraints=cons, method='SLSQP')
nodes = result.x.reshape(N, 2)
# 计算最小距离
min_dist = np.inf
for i in range(N):
for j in range(i + 1, N):
dist = np.linalg.norm(nodes[i] - nodes[j])
if dist < min_dist:
min_dist = dist
print(f"最小距离: {min_dist}")
# 绘制优化后的节点分布图
fig, ax = plt.subplots()
circle = plt.Circle((0, 0), R, color='b', fill=False)
inner_circle = plt.Circle((0, 0), inner_R, color='r', fill=False)
ax.add_artist(circle)
ax.add_artist(inner_circle)
ax.scatter(nodes[:, 0], nodes[:, 1])
plt.xlim(-R, R)
plt.ylim(-R, R)
plt.gca().set_aspect('equal', adjustable='box')
plt.show()运行结果:
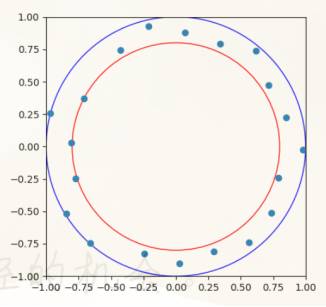
图6 圆环区域内传感器节点位置优化后图

图7 圆环区域内传感器节点位置优化后MATLAB输出结果图
通过以上步骤,使用模拟退火算法和遗传算法来实现节点在圆环区域内的稀疏分布,代码实现了节点位置的优化,确保其在圆环区域内最大化最小距离。这种优化方法有效解决了传感器节点分布问题,减轻了电磁互扰。
通过采用传统方法和智能方法求解圆环内传感器节点最大最小距离分布问题,可以观察到,传统方法求出的结果相比于智能方法更优。
针对可能原因进行分析,模拟退火算法和遗传算法都是基于随机搜索的全局优化算法。尽管它们具有跳出局部最优解的能力,但由于随机性的存在,可能需要大量的迭代才能找到接近全局最优解的结果。
在非凸优化问题中,传统凸优化方法是由于其利用了梯度信息、高效的局部搜索能力、稳定的收敛特性以及结合改进算法和多启动策略等因素。尽管这些方法不能保证找到全局最优解,但在实际应用中,尤其是在特定规模和结构的问题上,传统凸优化方法仍能找到高质量的解并表现出较高的计算效率。相比之下,模拟退火算法和遗传算法作为全局优化算法,虽然在处理非凸优化问题上具有一定的优势,但由于其随机性和高计算成本,往往无法在凸优化问题上表现得比传统方法更好。
完整的文档、Python代码放在了下面链接中,需要自取:
智能方法求解-圆环内传感器节点最大最小距离分布
如果获取上述方式获取不到资源,请在评论区发表自己的邮箱地址(私信不回复),看到后会尽快发送给你。
文章若有不当和不正确之处,还望理解与指出。由于部分文字、图片等来源于互联网,无法核实真实出处,如涉及相关争议,请联系博主删除。如有错误、疑问和侵权,欢迎评论留言联系作者,或者私信联系作者。
版权说明:如非注明,本站文章均为 扬州驻场服务-网络设备调试-监控维修-南京泽同信息科技有限公司 原创,转载请注明出处和附带本文链接。
请在这里放置你的在线分享代码